汽车搬运机器人控制系统的研究
【编者按】近年来,随着城市汽车拥有量的不断上升,停车难的问题也越来越严重。为了获得尽量多的车位,使原本只停一辆汽车的空间能停2~3辆汽车,甚至更多,为了解决城市停车空间的紧张和狭窄问题,各种各样的立体停车库和相应的控制系统应运而生。它们在汽车的搬运形式和仓储方式上,也是多种多样,其中比较具有代表性的就是采用汽车搬运机器人搬运形式的智能化立体停车库。
智能化立体停车库是集各种高新技术为一体的智能化、立体化的汽车储运系统,它能够快速、可靠地完成汽车的存取以及相关信息的管理,如停车位、停车时间的记录,停车费的收取等。立体停车库可以建在地上,也可以建在地下。此类立体停车库的核心部件就是汽车搬运机器人,它是一种是集自动化技术、机器人技术、计算机技术为一体的高新技术产品。
为了顺应市场的需求,我们研制开发了一种新型的汽车搬运机器人,应用在智能化立体停车库中。以下对其工作原理和软硬件设计加以介绍。
2 使用汽车搬运机器人的立体停车库
2.1 立体停车库的机械搬运系统
立体停车库的机械搬运系统一般由运输平台、自主引导行走机器人(即汽车搬运机器人)、出入口回转平台和快速卷帘门等部分组成。一般在立体停车库的汽车出入口设有回转定位平台,运输平台运行于立体停车库的巷道中,在运输平台上配备汽车搬运机器人,形成了一套完整的回转、运行、升降、交接工作装置。卷帘门分别设在回转平台、出入口的正面及两个内侧,将转台与车库、转台与出入口隔离。立体停车库的布置示意图如图1所示。

2.2 立体停车库的电气控制系统
立体停车库的电气控制系统一般由计算机信息管理系统、出入口控制系统和搬运控制系统等组成。搬运控制系统一般由可编程序控制器构成,包括搬运机器人控制系统和运输平台控制系统;出入口控制系统包括主控制器、计算机服务器和汽车停车位姿态检测系统;信息管理系统包括主计算机、热备份计算机以及若干台计算机操作终端。
3 汽车搬运机器人的结构及工作过程
(1) 汽车搬运机器的结构
汽车搬运机器人的外型为扁平长方体,高度为170mm,长宽为1750mm×1430mm。在其4个角上有4个嵌在内部的轮子用来做水平行走,由2台dc24v/370w的直流电机驱动,行走速度为20m/min。在机器人两侧各有两组夹持臂,即主夹持臂和辅夹持臂,分别由主、辅臂液压泵和液压换向阀门控制其推出和收回。主臂的动作为推出-举升,辅臂的动作为收回-夹紧,用来抱起汽车的4个车轮,使其抬离地面,从而达到搬运汽车的目的。液压泵选用意大利hydrapp产品,规格为dc24v/600w,换向阀选用德国bosch公司产品。主臂推力1.2t,辅臂握紧力200kg。机器人的行走定位由安装于其左、右侧面的dmp激光位置检测器完成。机器人的防撞检测由安装于其前、后端的dme激光检测开关完成。另外,在机器人的前后两面各有1组条状的led显示器,作为汽车搬运机器人运行和故障状态的监视。
汽车搬运机器人在运行时,根据上位机的控制指令,行走到要搬运的汽车底盘下,伸出其夹持臂,将汽车的4个车轮抬起,运行到目的地后放下。汽车搬运机器人搬运汽车时的运行工况如图2所示。

(2) 工作过程
汽车搬运机器人的工作过程如下:当入库车辆在回转平台上定位后,汽车搬运机器人依照上位机的指令,自动由运输平台驶入入库车辆底盘下方(运输平台是汽车搬运机器人的母体,换句话说,汽车搬运机器人的原位为运输平台),夹紧装置将入库车辆的4个汽车车轮夹紧,顶起装置将入库车辆顶起并抬离地面约3cm,然后由汽车搬运机器人携带入库车辆返回运输平台。运输平台按主控计算机的运动规划,运动到预定货位。汽车搬运机器人从运输平台移至指定货位,汽车搬运机器人的顶起机构收回,将被搬运车辆放下,夹紧机构松开回位。汽车搬运机器人重新回到其母体—运输平台,由运输平台将汽车搬运机器人送回至出入口,完成1个车辆入库的动作循环。车辆摆放遵循“就近原则”,以提高搬运效率。车辆出库时,汽车搬运机器人和运输平台的运动顺序与上述过程相反。
4 汽车搬运机器人控制系统的硬件设计
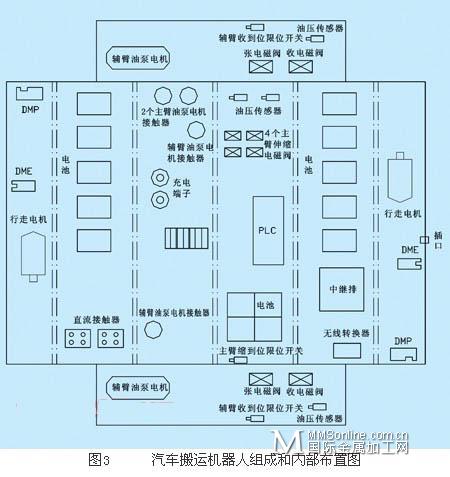
汽车搬运机器人的控制系统集成在机器人本体内,其系统组成和布置图如图3所示。搬运机器人内的可编程序控制器通过无线通讯方式与其母体—运输平台保持通讯联络,运输平台再经过红外通讯与主控计算机通讯,以接受上位机命令并上传运行状态。主控计算机负责集中控制和管理汽车搬运机器人与运输平台的协调运动。图3中的无线转换器采用研华公司的adam4550,它一端接plc的rs-232接口,另一端为2.4g微波信号,它与运输平台控制系统中的adam4550一起,构成了在汽车搬运机器人控制系统与运输平台控制系统之间的无线数据传输线路。
主控制器选用的是siemens公司s7-300系列plc,其硬件系统配置如图4所示,plc的i/o接线表见附表。

5 汽车搬运机器人控制系统的软件设计
汽车搬运机器人控制程序的编制充分利用了siemens plc编程软件step
7提供的软件平台,将整个控制程序模块化。控制程序主要有:主控程序模块、模拟数据采集模块、伺服装置控制模块、停车货位参数模块、液压装置控制模块、故障检测模块、显示模块和通讯模块等。以下仅对关键的汽车搬运机器人在货位上取车和放车的控制程序加以介绍。
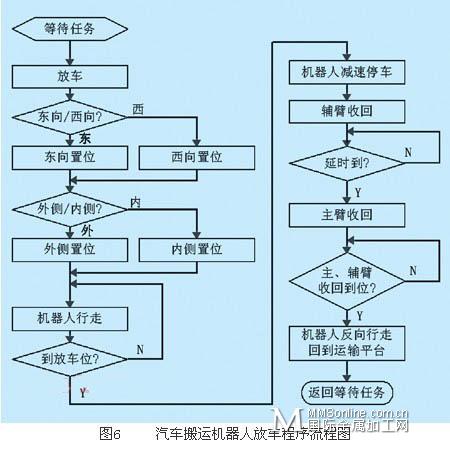
取车程序流程图如图5所示,放车程序流程图如图6所示,有关内容说明如下:
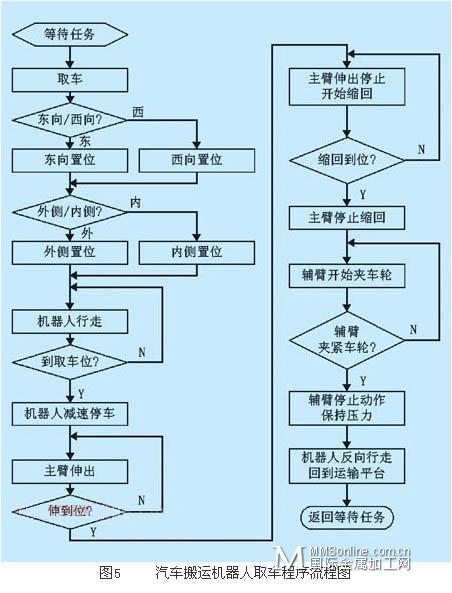
(1)立体停车库为多层结构,分东、西两侧,每侧有若干个汽车货位,每个货位空间分为内侧车位和外侧车位,可以存放两辆汽车。运输平台在停车库中间巷道沿上下、东西方向行驶,它按照主控计算机的指令,将汽车放置在指定货位或从指定货位取出汽车;
(2) 若在东侧货位取(放)车,机器人正向行驶,在西侧货位则反向行驶;
(3)在货位空间两侧墙壁适当位置上安装了反光板,它们和搬运机器人上的dmp激光位置检测器配合,完成搬运机器人在内侧车位和外侧车位的定位任务;
(4) 主臂的作用是将汽车抬离地面,辅臂的作用是夹紧汽车的4个轮胎,是否夹紧的判断通过检测辅臂油缸压力值的大小来完成。
6 结束语
本文介绍的汽车搬运机器人高度不超过17cm,平面尺寸略大于普通轿车的底盘,在国际上同类产品中占用空间最小、行走速度最快。与其他类型的立体停车库相比较,采用汽车搬运机器人的停车库占用空间更小,工程造价更低,存车和取车的速度也更快。
以上介绍的汽车搬运机器人及立体停车库已经在北京市某地下停车场运行两年多,整个系统的工作稳定可靠,达到了预期的设计目的。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@blueai.net.cn。
- 暂无反馈
